
Cooperative Robots
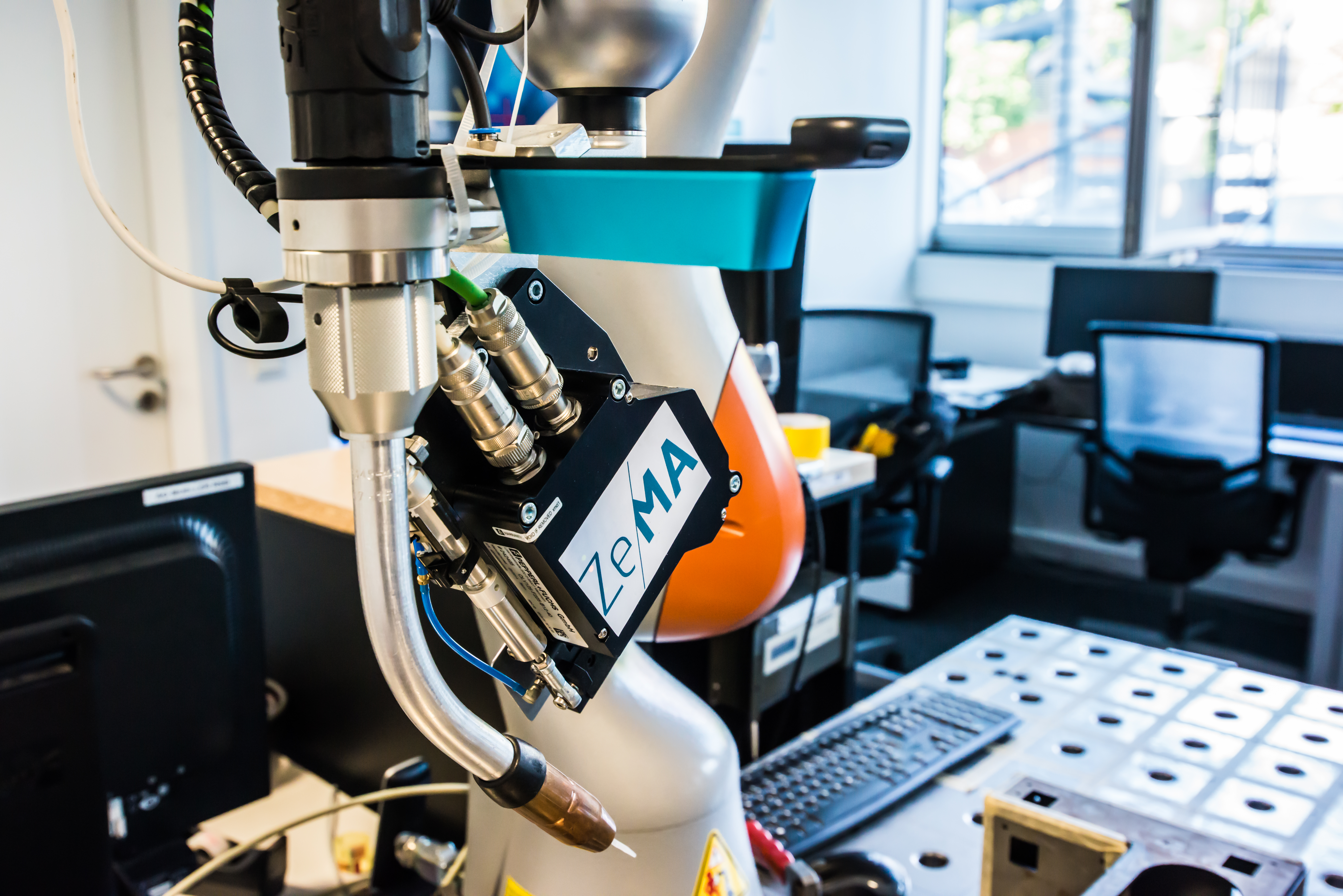
Setup for Vision-based Welding Path Correction
The project seminar “Cooperative Robots” was offered at Saarland University by the DFKI. It aimed at human-robot interaction, a recent topic of industry 4.0. During that seminar several groups of students were asked to develop a software solution for a certain issue. Our group (3 students) developed a system for welding-path correction based on depth-information for a KUKA welding robot. This project was enabled by and conducted together with the ZeMA institute. The idea was to build a lightweight and low-cost system to enable the application for small lot sizes, e.g. in the field of special purpose engineering.